









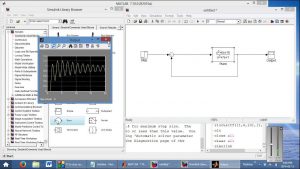
آونگ معکوس خط مستقیم(PID Simulink)
| PartNumber | Straight-line inverted pendulum |
تماس بگیرید
آونگ معکوس خط مستقیم(PID Simulink) مخصوص آموزش کنترل های بازخوردی و آموزش های دینامیکی و کنترلی و بررسی سیستم های خطی و غیر خطی
این محصول در حال حاضر موجود نمیباشد اگر به این محصول نیاز دارید اطلاعات زیر را تکمیل کنید
آونگ معکوس خط مستقیم(PID Simulink)
آونگ معکوس خط مستقیم(PID Simulink) یکی از سیستم های قدیمی-کلاسیک در مباحث دینامیک و کنترل است.در این پروژه روش های مختلفی برای تغییر پاندول از حالت ناپایدار به پایدار استفاده می شود.در انجام این پروژه شما در میابید که این سیستم یک سیستم ذاتا غیر خطی است.پس بر کنترل سیستم های خطی و غیر خطی مسلط خواهید شد.
از قسمت های دیگر هیجان انگیز این آونگ این است که در این سیستم شما تنها باید بتوانید با یک ورودی و دو خروجی ماموریت های زیر را انجام دهید:
-
- موقعیت ارابه
- زاویه پاندول
این اطلاعات را می توانید در محیط های ریاضی و نرم افزار مهندسی (متلب) شبیه سازی و یا اطلاعات را پردازش و مورد تحقیق قرار دهید.
مشخصات تراشه:
کنترلر اصلی این آونگ مبتنی STM32F103C8T6 است.
محیط توسعه کد:KEIL MDK است.
این MCU دارای حافظه فلش64 کیلوبایت و فرکانس کاری 72 مگاهرتز می باشد.نکته قابل توجه این است که (Mainboard )می تواند محافظت های زیر را برای این آنگ تامین کند:
-
- حفاظت اتصال معکوس
- حفاظت از جریان های اضافی
- حفاظت الکترو استاتیکی
- محافظت از اتصال کوتاه
شما می توانید با زبان برنامه نویسی C/C++ اقدام به کد نویسی این آونگ کنید.حتی می توانید از کتابخانه های موجود برای راه اندازی این آونگ استفاده کنید.
مشخصات موتور:
-
- ولتاژ موتور:12 ولت
- قدرت (نامی):4.32 وات
- نوع موتور:آهن ربا دائمی
- جربان کشی:2.8 آمپر
- نسبت گریبکس ها:1:20
- نوع رابط این موتور کانکتور استاندارد می باشد.(XI12.54)
مشخصات کلی این آونگ:
وزن این آونگ بدون قسمت های کنترلی به خدود 1.6 کیلوگرم می رسد.ولتاژ مورد نیاز برای راه اندازی 12 ولت می باشد.
طول آونگ 39 سانتی متر .
طول و عرض کل:57*12.5 میلیمتر .
اجزای این آونگ
-
- سکوی ریلی
- موتور گریبکس MG513
- سنسور جابجایی زاویه ای
- پاندول
- اتصالات
- برد کنترلر
- آداپتور برق
- کابل usb انتقال دیتا
- نمایشگر oled گرافیکی











shirvaniamin44 –
کنترلر اصلی این آونگ مبتنی بر STM32F103C8T6 است