





موتور سیکلت تعادلی
| PartNumber | self-balancing bicycle |
تماس بگیرید
موتور سیکلت تعادلی مناسب برای آموزش و یا انجام پروژه هایی در زمینه دینامیک و کنترل و جهت نوشتن الگوریتم های سیستم های خطی
این محصول در حال حاضر موجود نمیباشد اگر به این محصول نیاز دارید اطلاعات زیر را تکمیل کنید
موتور سیکلت تعادلی
موتور سیکلت تعادلی می تواند بدون نیاز به تجهیزات جانبی(پایه نگهدارنده و…) تعادل خود را حفظ کند.این ربات با به تعادل رسیدن می تواند به سمت عقب و جلو حرکت بکند.
مکانیزم حفظ تعادل این ربات مبتنی بر RW-چرخ واکنشی(Reaction wheel) می باشد.این مکانیزم در درجه اول توسط فضاپیما ها مورد آزمایش قرار گرفت.این چرخ ها نیاز به اعمال گشتاور خارجی ندارند.
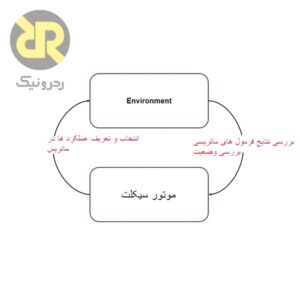
تمام تنظیمات این موتور را می توانید در نرم افزار های مهندسی(متلب) کنترل کنید.
از طرفی دیگر انجام چنین پروژه ای می تواند به شما دید عملی مناسبی برای تحقیق در مورد مکانیزم های کنترلی (PID) بدهد.از طرف دیگر می توان از الگوریتم های این ربات برای پروژه های دیگر در زمینه دینامیک و کنترل بهره برداری کنید.
مسائل پایداری و متعادل کردن اجسام از مسائل کلاسیک و مهم دینامیک بوده است.
اجزا این ربات:
- 2 عدد چرخ
- سروو موتور
- شارژر
- OLED
- قالب بدنه پلکسی
- مجموعه کوپلینگ ها،یاتاقان،شفت ها
- باتری لیتیومی










shirvaniamin44 –
این ربات با به تعادل رسیدن می تواند به سمت عقب و جلو حرکت بکند.